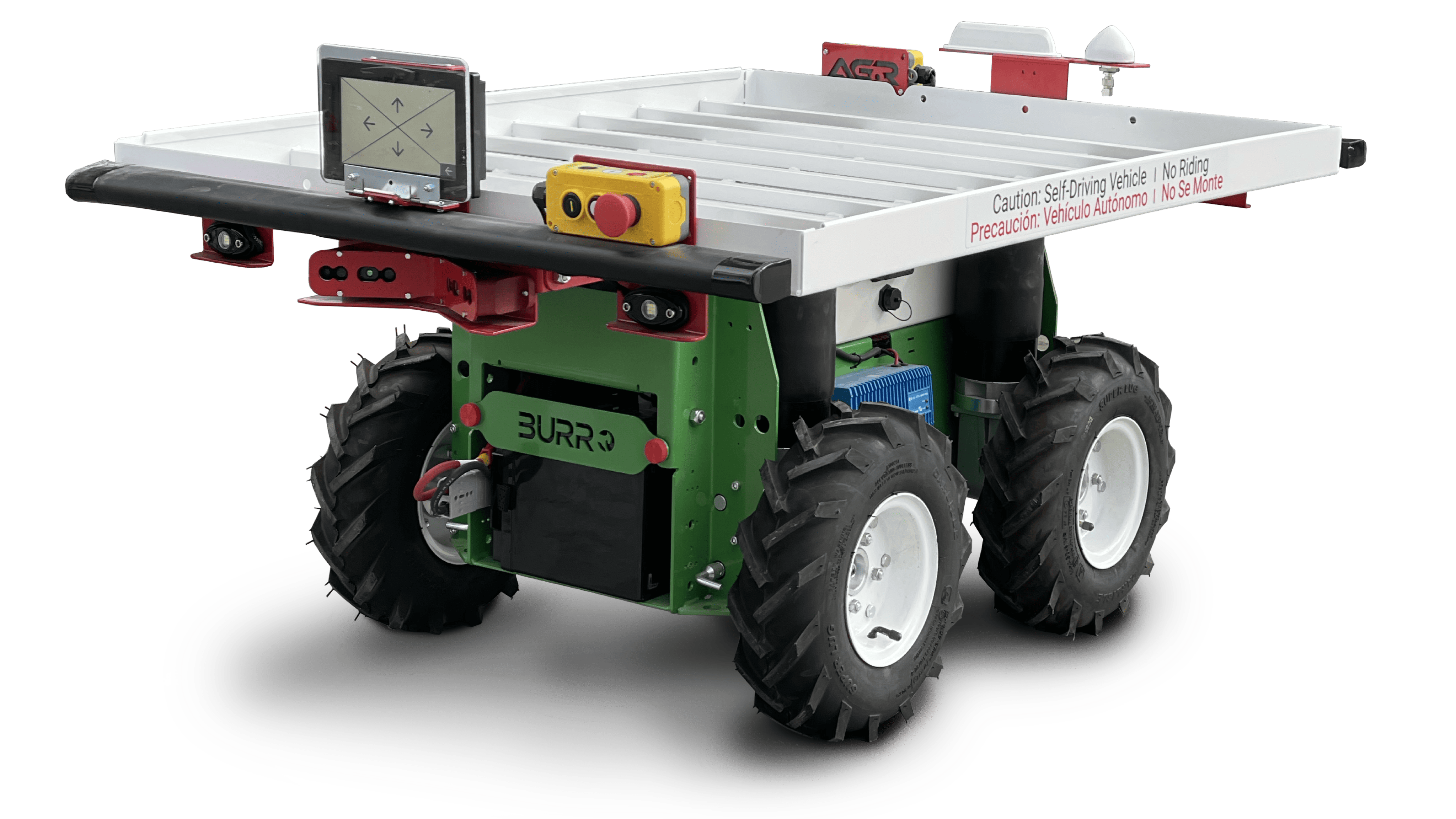
The Burro was designed with you in mind.
Burros are collaborative robots designed to help people work more productively today, while building the base for the automation where it is needed most. Our technology utilizes computer vision, high-precision GPS and AI to follow people and navigate autonomously from A to B while performing multiple tasks. Burros work immediately out of the box with no need for a central command or new infrastructure.
Key Features

Easy to use.
Pop-Up Autonomy™ is our patent-pending approach that allows Burro to work immediately out of the box and enables everyone as an operator with no need for a central command or new infrastructure. Turn it on and go.
Infinitely Capable.
In addition to serving as a platform, Burros can carry, tow, scout, patrol, mow, push, pull or propel a variety of attachments, and serve as a platform for manipulation.

Super Smart.
Burro robots use both computer vision and high-precision GPS to learn and teach themselves to navigate new environments. This means that Burros can run on “digital train tracks” through complex settings, all day long, even if GPS is not available. They use AI to understand their surroundings and safely travel through tall weeds and branches, and stopping for real obstacles and people.
And always getting smarter.
Once you train one burro, share that knowledge across an entire fleet for immediate productivity gains and superior ease of use. Fleets are tracked online via a user-friendly dashboard, providing users command center level control. Plus, Burros receive Over the Air (OTA) updates with new software, capabilities and AI models every two weeks.

Customized levels of autonomy
Burro XL is compatible with two autonomy packages depending on the desired level of mission autonomy.
Burro Pop-Up Autonomy
| Atlas Mission Autonomy | High-Precision Atlas Mission Autonomy | |
Person following and obstacle stopping | |||
Row following and row-to-row through blocks | |||
Teach-and-repeat and route sharing | |||
Create routes with 1cm precision | |||
Autonomous docking | |||
Push online routes to Burros | |||
Attachment control | |||
Virtual Base Station with NTRIP (where available) | |||
Lidar Localization (if Lidar on system) | |||
$209/month | $265/month | $315/month |
Build Your Fleet Today.
Our sales team can assist you in figuring out what configuration would best suit your unique needs and environment.
Advanced features for added layers of safety
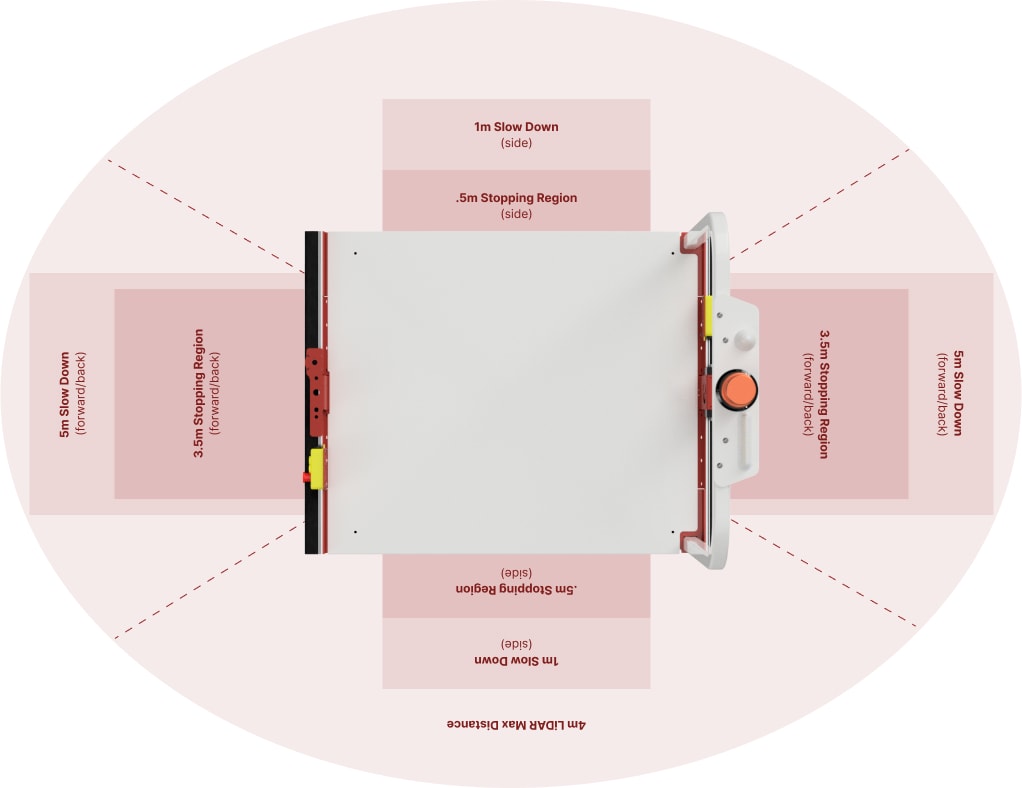
Utilizing lidar, computer vision, high-precision GPS and AI
Operate using the technology of our original Burro, with the additional security of 360° obstacle detection using Lidar. Safety is our top priority, as shown in the redundancy of our safety features.

Increase your capabilities with an expansion pack.
Burro integrates with the following expansion packs & kits.
Not sure which combination would be best for your unique needs? We’re here to help!

Docking station

Burro Guard Dog™

Mowing & Attach Pack

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ready to Work in All Conditions
High temperatures, moisture, dust and abuse—no problem. Burros are IP65 rated and designed to operate all day long in 110 f / 40+ C temps all day, while taking abuse inherent to real-world field conditions. They are also careful enough to work in more sensitive environments like greenhouses.
Specifications
| People Following | Vision based |
| Teach & Repeat | Vision based + GPS |
| Row Following | Vision based |
| Obstacle Handling - stopping and avoidance/path planning | Vision |
| Data Collection | Up to 1 terabyte/hour |
| Crop Row Scouting | Vision based |
| Remote View | Online dashboard view (see robot on map, what it’s doing, and what it is seeing) |
| Cameras | 12 |
| GPS | RTK |
| CPU & GPU | Onboard (all computing onboard/local) |
| Storage | 256GB+ |
| Modem | 4G LTE Modem |
| Cooling | Zero-ingress forced-air cooling system |
| Bumper Bars | Front and Rear |
| Lighting | Safety/area lighting front and rear |
| Safety Noises | Alerts so users hear Burro and know what Burro is doing |
| Weight, lbs. (kg) | 420 (190) |
| Max payload, lbs. (kg) | 500 (227) |
| Length, inches (cm) | 54.7 (138.9) |
| Width, inches (cm) | 27 (68.5) |
| Height, inches (cm) | 27.3 (69.3) |
| Tires | 14×4.50-6 R1 |
| Wheel Motors | 5 horsepower |
| Range, miles (KM) | 10 NOTE: Range depends on speed and load. |
| Batteries | 2.56 kWh LFP batteries |
| Batteries Field Swap-able? | yes |